C# roguelike, devlog 3: Pathfinding algorithms (Breadth-first search and A*)
Introduction
Pathfinding is a crucial component in almost any video game, and will be used in the next step of the dungeon generation to check if two given rooms are already connected when making corridors.
There are two types of pathfinding I will implement at this stage, the first one is breadth-first search (BFS), and the second is A*.
The video A* Pathfinding (algorithm explanation) by Sebastian Lague gives a very good visual explaination of the A* pathfinding algorithm.
The following articles by Amit Patel thought me about pathfinding algorithms and how to implement them:
Implementation
I’ll make a new class for pathfinding called PathGraph and add that to the Map.
With the goal of trying to keep the pathfinding datastructure as small and fast as possible I’ve chosed to represent each location in the world as a single number ((mapWidth * y) + x) of the type int. uint would perhaps be more suitable here since the numbers never are negative, but I’ll stick with int since working with ints is much easier than with uints in C# (most built-in functions use int so when using uint it requires constant casting to int) and since the max value for int is 2,147,483,647, which should be much more than enough for any use case.
To convert an x and y value to a single-number coordinate I’ll add a MapCoord() method to the Map class.
But I’ll also be working with X and Y coordinates so I’ll set up a new datatype Vec2 for that. It works just like a built-in Vector2, but uses ints instead of floats (for now the Vec2 is very simple, but I can add more functionality as needed later).
In the Map class I’ll also add a method MapCoordReverse() to convert a single-number map coordinate to a Vec2.
In BspTree I’ll add some methods so that all the visitable locations are added to the PathGraph after the rooms have been created.
Next up is adding the PathGraph class.
It contains a reference to the map it belongs to and a dictionary of all the locations that are visitable, and for each location an array of neighbouring locations that are visitable.
It contains the following methods:
AstarCheck()Uses the A* algorithm to check if a valid path exists between two given points on the map. Returns true if a valid path exists or false if not.AstarPath()Uses the A* algorithm to find a path between two given points on the map. It returns the path as a list of locations in order from start location to target location, or returns null if no valid path exists between the two given points.BfsCheck()Same asAstarCheck(), but uses the Breadth-first search algorithm instead.BfsPath()Same asAstarPath(), but uses the Breadth-first search algorithm instead.BfsMap()Uses the Breadth-first search algorithm to visit any valid location from a given location and returns a dictionary of visited locations. The dictionary key is the visited location and the dictionary value is the distance from the start location. The method also has an optional reverse parameter given as an int. If a reverse value is given the search starts at the given value and decrements as it gets further away from the start location until reaching zero.Heuristic()Gets the heuristic cost for a location. This is used in the A* algorithm to determine the cost for a given location.GetCost()Checks a given dictionary for a given location and returns the cost for that location. If the dictionary does not contain the location a default value is returned instead.GetLocation()Gets an array of all visitable neighbors of a given location from thelocationsdictionary.SetLocation()Adds a new or changes an existing location in thelocationsdictionary.HasLocation()Checks if thelocationsdictionary contains a given location.TryAddNeighbor()Add a new neighbor to a location in thelocationsdictionary. But only add the neighbor if a) the dictionary contains the location, and b) the location doesn’t have the neighbor already.AddRoom()Add all visitable locations and from a given Room to thelocationsdictionary by using theAddArea()method.AddArea()Add all visitable locations from a given area to thelocationsdictionary. For each location it cecks for visitable neighbors. If the modifiyNeighbors parameter is set to true a check will also be made to see if thelocationsdictionary already contains the neighbor and modify it to add the current location as a neighbor. This is a more expensive operation, and isn’t needed if adding isolated areas. But if adding an area that connects to an area that already exists inlocationsthen modifyNeighbors should be set to true.
├── Roguelike.csproj
└── src
├── BspNode.cs
├── BspTree.cs
├── Game.cs
├── Map.cs
├── + PathGraph.cs
├── Rand.cs
├── Room.cs
└── + Vec2.cs
...
// Map size
public readonly int width;
public readonly int height;
// Map data
public BspTree tree { get; private set; }
private bool?[,] map;
+ public readonly PathGraph pathGraph;
// Constructor
public Map(int width, int height)
{
this.width = width;
this.height = height;
this.map = new bool?[width, height];
+ this.pathGraph = new PathGraph(this);
this.tree = new BspTree(this, width, height);
BuildMap();
Render();
}
...
+ public int MapCoord(int x, int y)
+ {
+ return (width * y) + x;
+ }
+ // Converts mapcoord to Vec2
+ public Vec2 MapCoordReverse(int coord)
+ {
+ return new Vec2(coord % width, coord / width);
+ }
...
...
// Constructor
public BspTree(Map map, int width, int height, int x = 0, int y = 0)
{
this.id = count;
count++;
this.x = x;
this.y = y;
this.width = width;
this.height = height;
this.map = map;
// Generate all nodes and rooms
this.root = new BspNode(this, width, height);
+ // Generate pathfinding graph for all the rooms
+ AddAllRoomsToPathGraph();
// Print info for all nodes
VisitAllNodes(NodeInfo);
}
+ // Add all the rooms to the pathfinding graph
+ public void AddAllRoomsToPathGraph()
+ {
+ BspNode[] nodes = NodeArray();
+ foreach (BspNode node in nodes) { if (node.HasRoom()) { map.pathGraph.AddRoom(node.room); }}
+ }
+ // Return an array containing all nodes
+ public BspNode[] NodeArray()
+ {
+ BspNode[] nodeArray = new BspNode[BspNode.count];
+ NodeArrayAdd(root, ref nodeArray);
+ return nodeArray;
+ }
+
+ // Traverse all child nodes and add to array
+ private void NodeArrayAdd(BspNode node, ref BspNode[] nodeArray)
+ {
+ nodeArray[node.id] = node;
+ if (node.children[0] != null) { NodeArrayAdd(node.children[0], ref nodeArray); }
+ if (node.children[1] != null) { NodeArrayAdd(node.children[1], ref nodeArray); }
+ }
...
namespace Roguelike;
/// <summary>
/// Integer Vector 2.
/// </summary>
public class Vec2
{
public int x { get; set; }
public int y { get; set; }
public Vec2(int x, int y)
{
this.x = x;
this.y = y;
}
public static Vec2 operator +(Vec2 a, Vec2 b)
{
return new Vec2(a.x + b.x, a.y + b.y);
}
}
namespace Roguelike;
/// <summary>
/// A data structure that contains visitable locations and its neighbors and algorithms for pathfinding.
/// </summary>
public class PathGraph
{
// The map this pathgraph belongs to
public readonly Map map;
// Stores a location and its visitable neighbors
private Dictionary<int, int[]> locations = new Dictionary<int, int[]>();
// Constructor
public PathGraph(Map map)
{
this.map = map;
}
// A* search to check if a valid path exists between start and end locations
public bool AstarCheck(int start, int target, Dictionary<int, int> costs = null)
{
// Check if start/end locations are visitable
if (!HasLocation(start) || !HasLocation(target)) { return false; }
// Locations to visit
PriorityQueue<int, int> toVisit = new PriorityQueue<int, int>();
toVisit.Enqueue(start, 0);
// Dictionary of all reached locations and cost to get there
Dictionary<int, int> costSoFar = new Dictionary<int, int>();
costSoFar.Add(start, 0);
// Start search
while (toVisit.Count > 0)
{
int current = toVisit.Dequeue();
// Target found
if (current == target) { return true; }
// Search neighbors
foreach (int next in GetLocation(current))
{
int nextCost = (costs != null ? GetCost(costs, next, 1) : 1);
int newCost = costSoFar[current] + nextCost;
if (!costSoFar.ContainsKey(next) || newCost < costSoFar[next])
{
toVisit.Enqueue(next, newCost + Heuristic(next, target));
costSoFar[next] = newCost;
}
}
}
// Target not found
return false;
}
// A* search to find the shortest path between two locations
public List<int> AstarPath(int start, int target, Dictionary<int, int> costs = null)
{
// Check if start/end locations are visitable
if (!HasLocation(start) || !HasLocation(target) || start == target) { return null; }
// Locations to visit
PriorityQueue<int, int> toVisit = new PriorityQueue<int, int>();
toVisit.Enqueue(start, 0);
// Dictionary of all reached locations and the previously visited location
Dictionary<int, int> cameFrom = new Dictionary<int, int>();
cameFrom.Add(start, start);
// Dictionary of all reached locations and cost to get there
Dictionary<int, int> costSoFar = new Dictionary<int, int>();
costSoFar.Add(start, 0);
// Start search
bool found = false;
while (toVisit.Count > 0)
{
int current = toVisit.Dequeue();
// Target found
if (current == target) { found = true; break; }
// Search neighbors
foreach (int next in GetLocation(current))
{
int nextCost = (costs != null ? GetCost(costs, next, 1) : 1);
int newCost = costSoFar[current] + nextCost;
if (!costSoFar.ContainsKey(next) || newCost < costSoFar[next]) {
toVisit.Enqueue(next, newCost + Heuristic(next, target));
cameFrom[next] = current;
costSoFar[next] = newCost;
}
}
}
// Retrace path from target to start
if (found)
{
List<int> path = new List<int>();
int current = target;
while (cameFrom[current] != current)
{
path.Add(current);
current = cameFrom[current];
}
path.Reverse();
// Return path from start location to target location
return path;
}
// Target location not found
return null;
}
// Breadth-first search (BFS) to check if a valid path exists between start and end locations
public bool BfsCheck(int start, int target)
{
// Check if start/end locations are visitable
if (!HasLocation(start) || !HasLocation(target)) { return false; }
// Locations to visit
Queue<int> toVisit = new Queue<int>();
toVisit.Enqueue(start);
// Dictionary of all reached locations and the previously visited location
Dictionary<int, int> cameFrom = new Dictionary<int, int>();
cameFrom.Add(start, start);
// Start search
while (toVisit.Count > 0)
{
int current = toVisit.Dequeue();
// Target found
if (current == target) { return true; }
// Search neighbors
foreach (int next in GetLocation(current))
{
if (!cameFrom.ContainsKey(next)) {
toVisit.Enqueue(next);
cameFrom.Add(next, current);
}
}
}
// Target not found
return false;
}
// Breadth-first search (BFS) to find the shortest path between two locations
public List<int> BfsPath(int start, int target)
{
// Check if start/end locations are visitable
if (!HasLocation(start) || !HasLocation(target) || start == target) { return null; }
// Locations to visit
Queue<int> toVisit = new Queue<int>();
toVisit.Enqueue(start);
// Dictionary of all reached locations and the previously visited location
Dictionary<int, int> cameFrom = new Dictionary<int, int>();
cameFrom.Add(start, start);
// Start search
bool found = false;
while (toVisit.Count > 0)
{
int current = toVisit.Dequeue();
// Target found
if (current == target) { found = true; break; }
// Search neighbors
foreach (int next in GetLocation(current))
{
if (!cameFrom.ContainsKey(next)) {
toVisit.Enqueue(next);
cameFrom.Add(next, current);
}
}
}
// Retrace path from target to start
if (found)
{
List<int> path = new List<int>();
int current = target;
while (cameFrom[current] != current)
{
path.Add(current);
current = cameFrom[current];
}
path.Reverse();
// Return path from start location to target location
return path;
}
// Target location not found
return null;
}
// Breadth-first search (BFS) to generate a map of values to/from (depends if reverse is null or not) a list of start locations
public Dictionary<int, int> BfsMap(List<int> start, int? reverse = null)
{
// Locations to visit
Queue<int> toVisit = new Queue<int>();
// Dictionary of all reached locations and the previously visited location
Dictionary<int, int> cameFrom = new Dictionary<int, int>();
// Dictionary of all reached location and distance to start
Dictionary<int, int> distanceTo = new Dictionary<int, int>();
// Add start locations
foreach (int location in start)
{
if (!HasLocation(location)) { return null; }
toVisit.Enqueue(location);
cameFrom.Add(location, location);
distanceTo.Add(location, (reverse != null ? (int)(reverse) : 0));
}
// Start search
while (toVisit.Count > 0)
{
int current = toVisit.Dequeue();
// Search neighbors
foreach (int next in GetLocation(current))
{
if (!cameFrom.ContainsKey(next)) {
if (reverse == null || distanceTo[current] - 1 > 0)
{
toVisit.Enqueue(next);
cameFrom.Add(next, current);
distanceTo.Add(next, (reverse != null ? distanceTo[current] - 1 : distanceTo[current] + 1));
}
}
}
}
// Return the map
return distanceTo;
}
// Return heuristic cost for a location
private int Heuristic(int aCoord, int bCoord)
{
Vec2 a = map.MapCoordReverse(aCoord);
Vec2 b = map.MapCoordReverse(bCoord);
return Math.Abs(a.x - b.x) + Math.Abs(a.y - b.y);
}
// Return cost for a location
public int GetCost(Dictionary<int, int> costs, int location, int defaultCost = 1)
{
int cost = 0;
if (costs.TryGetValue(location, out cost))
{ return cost; }
else { return defaultCost; }
}
// Return visitable neighbors for a given location
public int[] GetLocation(int location)
{
return locations[location];
}
// Set visitable neighbors for a given location
public void SetLocation(int location, int[] neighbors)
{
locations[location] = neighbors;
}
// Check if location exists in the graph
public bool HasLocation(int location)
{
return locations.ContainsKey(location);
}
// Try to add a new neighbor to a location, only add if location exists and doesn't have the neighbor already
public void TryAddNeighbor(int location, int neighbor)
{
if (HasLocation(location))
{
if (!GetLocation(location).Contains(neighbor))
{
List<int> neighbors = GetLocation(location).ToList();
neighbors.Add(neighbor);
SetLocation(location, neighbors.ToArray());
}
}
}
// Add all visitable locations from a room
public void AddRoom(Room room, bool modifyNeighbors = false)
{
AddArea(room.x, room.y, room.width, room.height, room.area, modifyNeighbors);
}
// Add all visitable locations from an area
public void AddArea(int worldX, int worldY, int width, int height, bool?[,] area, bool modifyNeighbors = false)
{
// Create a temporary dictionary for new nodes to be added to the nodes dictionary
Dictionary<int, int[]> newLocations = new Dictionary<int, int[]>();
// Loop through the area and check locations
for (int y = 0; y < height; y++)
{
for (int x = 0; x < width; x++)
{
if (area[x, y] == true)
{
// Get the current position
int thisPosition = map.MapCoord(worldX + x, worldY + y);
// Make list to populate with visitable neighbors
List<int> neighbors = new List<int>();
// Check if neighbor above the current location is a visitable location
bool upInBounds = worldY + y > 0;
if (upInBounds)
{
int upPosition = map.MapCoord(worldX + x, worldY + y - 1);
bool upPossible = HasLocation(upPosition) ? true : (y > 0 ? area[x, y-1] == true : false);
if (upPossible)
{
neighbors.Add(upPosition);
if (modifyNeighbors){ TryAddNeighbor(upPosition, thisPosition); }
}
}
// Check if right-side neighbor is a visitable location
bool rightInBounds = worldX + x + 1 < map.width;
if (rightInBounds)
{
int rightPosition = map.MapCoord(worldX + x + 1, worldY + y);
bool rightPossible = HasLocation(rightPosition) ? true : (x + 1 < width ? area[x+1, y] == true : false);
if (rightPossible)
{
neighbors.Add(rightPosition);
if (modifyNeighbors){ TryAddNeighbor(rightPosition, thisPosition); }
}
}
// Check if neighbor under the under current location is a visitable location
bool downInBounds = worldY + y + 1 < map.height;
if (downInBounds) {
int downPosition = map.MapCoord(worldX + x, worldY + y + 1);
bool downPossible = HasLocation(downPosition) ? true : (y + 1 < height ? area[x, y+1] == true : false);
if (downPossible)
{
neighbors.Add(downPosition);
if (modifyNeighbors){ TryAddNeighbor(downPosition, thisPosition); }
}
}
// Check if left-side neighbor is a visitable location
bool leftInBounds = worldX + x > 0;
if (leftInBounds)
{
int leftPosition = map.MapCoord(worldX + x - 1, worldY + y);
bool leftPossible = HasLocation(leftPosition) ? true : (x > 0 ? area[x-1, y] == true : false);
if (leftPossible)
{
neighbors.Add(leftPosition);
if (modifyNeighbors){ TryAddNeighbor(leftPosition, thisPosition); }
}
}
// Add the current location with its neighbors to the location dictionary
newLocations.Add(thisPosition, neighbors.ToArray());
}
}
}
// Add the found nodes to the main nodes dictionary
foreach (KeyValuePair<int, int[]> location in newLocations)
{
if (!HasLocation(location.Key)) { SetLocation(location.Key, location.Value); }
}
}
};
Conclusion
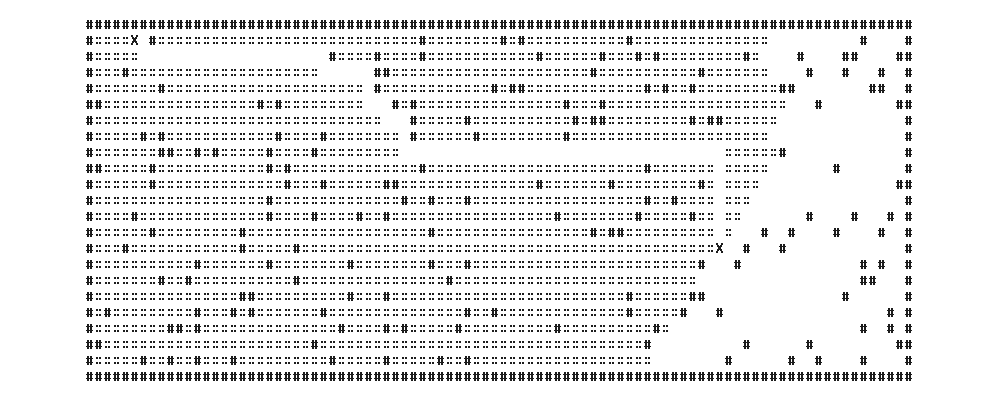
I’ll temporarily modify Map.cs and PathGraph.cs a bit to test the pathfinding algorithms:
...
// Map size
public readonly int width;
public readonly int height;
// Map data
public BspTree tree { get; private set; }
- private bool?[,] map;
+ public bool?[,] map;
public readonly PathGraph pathGraph;
// Constructor
public Map(int width, int height)
{
this.width = width;
this.height = height;
this.map = new bool?[width, height];
this.pathGraph = new PathGraph(this);
this.tree = new BspTree(this, width, height);
BuildMap();
+ // Pathfinding test
+ // (96 * y) + x position of start and target position in pathfinding test
+ if (pathGraph.BfsCheck((96*5) + 10, (96*10) + 20)) { Console.WriteLine("PATH FOUND!"); } else { Console.WriteLine("PATH NOT FOUND!"); }
Render();
}
...
...
// Breadth-first search (BFS) to check if a valid path exists between start and end locations
public bool BfsCheck(int start, int target)
{
// Check if start/end locations are visitable
if (!HasLocation(start) || !HasLocation(target)) { return false; }
// Locations to visit
Queue<int> toVisit = new Queue<int>();
toVisit.Enqueue(start);
// Dictionary of all reached locations and the previously visited location
Dictionary<int, int> cameFrom = new Dictionary<int, int>();
cameFrom.Add(start, start);
// Start search
while (toVisit.Count > 0)
{
int current = toVisit.Dequeue();
+ // Render searched locations as wall (for testing)
+ Vec2 pos = map.MapCoordReverse(current);
+ map.map[pos.x, pos.y] = false;
// Target found
if (current == target) { return true; }
// Search neighbors
foreach (int next in GetLocation(current))
{
if (!cameFrom.ContainsKey(next)) {
toVisit.Enqueue(next);
cameFrom.Add(next, current);
}
}
}
...
laser-wolf@arch:~/Roguelike $ dotnet run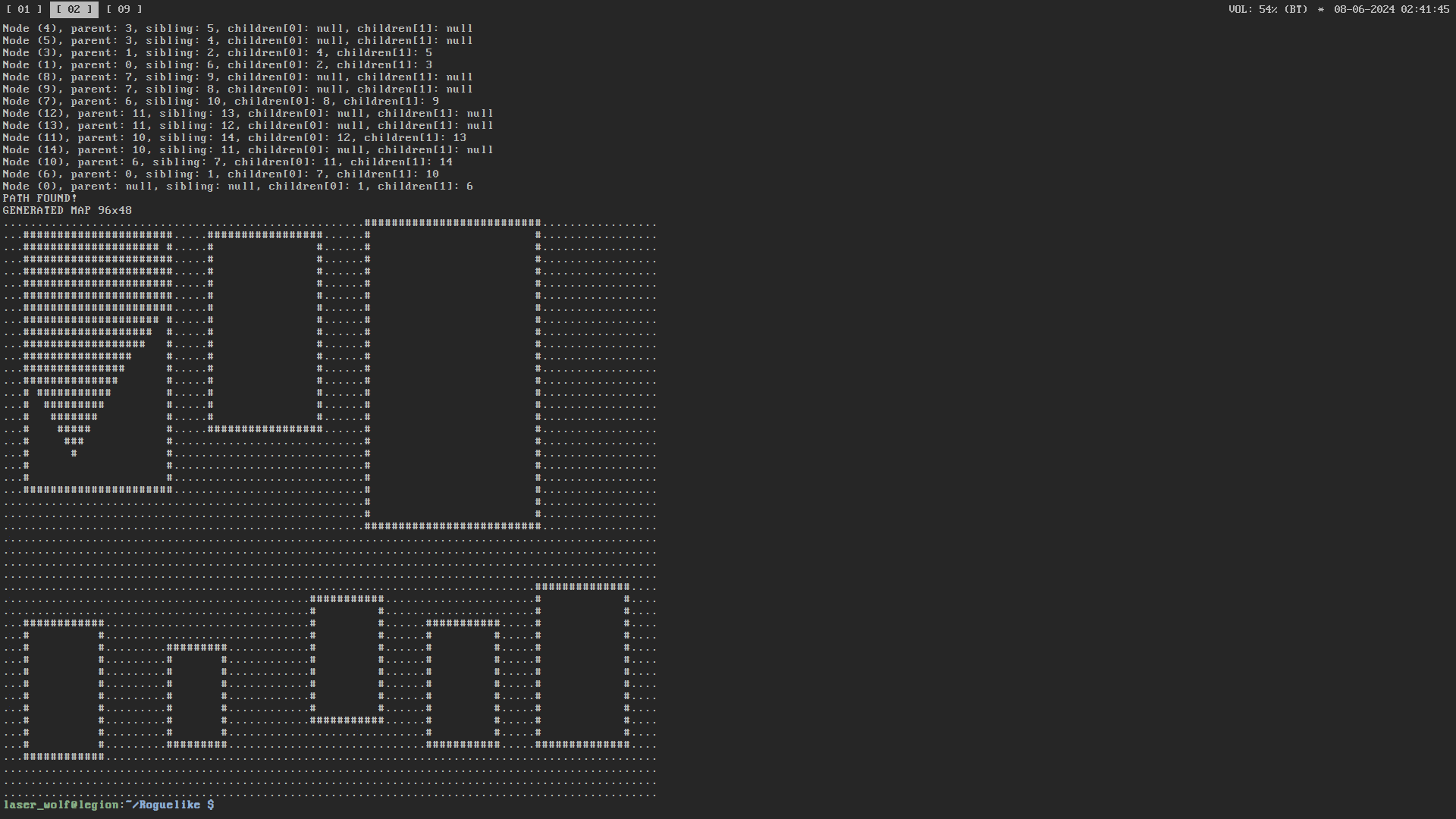
Download the source code: roguelike-devlog3.zip
Find the project on GitHub: casper-borretzen/Roguelike